
地球是一个被水粉饰的行星,名义约71%是海洋。大海不仅面积广阔,何况微妙莫测,其中物种各样,矿产丰富。百年来,东谈主类从未住手对大海的判辨和探索。
从海平面到水下1000米是临地空间的一部分。在这个区域中,物种的各样性组成了复杂的生态系统和丰富的海产资源,它将是东谈主类行径“向下”拓展的高大空间。
但是,由于海水的不均匀特质,明后会被罗致和散射。因此,“智能光电”期间应时而生,不错扫尾在阴郁的环境中对光信号进行探伤、传输,及智能化感知和分析。
中国电信东谈主工智能运筹帷幄院(TeleAI)正在加快激动“智能光电”期间的运筹帷幄职责,并与智能体、智传网(AIFlow)、AI处分形成“三智”+“一治”的齐全策略布局。

临地空间与东谈主们的履行生计紧密议论,TeleAI但愿通过AI起先包括赛博空间、临地空间、广域空间在内的“三大空间经济”发展,进一步拓展东谈主类的行径范畴。
跟着机械工程、意料机、东谈主工智能等期间的突飞大进,自主水下飘舞器(AutonomousUnderwaterVehicle,AUV)的应用得到进一步发展。
从深海参加到深海开发,AUV饰演着至关高大的脚色。AUV有时自主飘舞参加更深的水域空间,无需通过脐带电缆与其他平台辅导,就能实行各式任务。
但是,由于AUV造价腾贵,且佩戴多数稀疏的海洋数据,在完成任务后,每每需要以“诱掖回收”的神色使其安全返航,保险数据齐全,并扫尾开辟的重迭运用。
为了提高AUV终局光学诱掖回收的精度,中国电信CTO、首席科学家、中国电信东谈主工智能运筹帷幄院(TeleAI)院长李学龙老师指导团队伸开深远运筹帷幄,提议了“自主水下飘舞器多分支收集光学诱掖定位措施”。
该措施旨在为AUV在动力补充、数据传输和辅导下达等方面提供更快的解算速率、较低的算力功耗需求以及较少的能量浪费。
议论论文已在中国极品期刊《中国科学:信息科学》认真发表。

论文地址:
https://www.sciengine.com/SSI/doi/10.1360/SSI-2024-0183;JSESSIONID=8df64795-11e5-4fe3-8024-f4e0cd442a7c
冲突与立异
团队搭建了基于多象限测角的光学诱掖定位硬件系统,提议了多分支讲求收集的AUV光学诱掖定位措施。
该措施初度将深度收集引入多象限测角的光学诱掖定位位置解算任务中,想象了多分支结构的位置解算讲求收集。运筹帷幄了数据起先的多维度定位料理西席措施,构建了水下光学诱掖定位系统的物理几何议论,扫尾光学诱掖硬件与算法的一体化想象。通过解算多象限光电探伤器汇集的诱掖灯偏角数据,得到了AUV与诱掖灯的相对位置,及时输出AUV的即时位置坐标,AG百家乐下三路技巧打法完成了海进修证。

立异点1:诱掖硬件与算法一体化想象
为了扫尾水下光学诱掖大视角的高精度定位,团队接收了多象限光电探伤器,分析了诱掖灯组排布与AUV的物理几何议论,开发了光学诱掖偏角-位置的数学模子。
从诱掖灯的几何排布角度开赴,在表面上解释了使用三个非共线排布的诱掖灯不错确保诱掖灯偏角数据与AUV位置(简称偏角-位置)的逐一双应关系,是保证在算法层面产生独一位置真值解的高大前提条目。
立异点2:多分支结构的位置解算讲求收集
为了教诲模子的暗示才智,团队想象了多分支结构的位置解算讲求收集,通过多象限光电探伤器得到的诱掖灯偏角信息,将AUV位置解算的任务视为讲求问题,接收了编解码器结构,提高了位置解算精度和速率。

立异点3:多维度的空间位置料理方针函数
为了更高效地指导收集模子参数优化,团队从看法、距离、坐标三个维度想象收集模子方针函数,开发了多维度空间定位精度料理,进一步提高了收集模子的解算精度和泛化才智。
实验戒指
在AUV诱掖回收任务中,全面评估定位精度关于确保措施成果至关高大,团队通过在不同距离的定位精度实验,展示本文措施在位置解算的准确性。

为了直不雅展示多分支收集光学诱掖定位措施的位置坐标解算精度,团队想象了仿真轨迹以进一步测试AUV坐标议论轨迹的可视化戒指。
在调换的考证条目下,团队一样使用物理仿真马上生成的10万组偏角-位置数据,使用多项式讲求算法、支撑向量讲求算法、有策画树算法和马上丛林讲求算法,与多分支结构的位置解算讲求收集算法在0.8~20m的诱掖范畴内对定位坐标精度进行比较。
与传统讲求算法比较,多分支结构的位置解算讲求收集的扫数坐标差错均值仅为58.292mm,展现出更高的定位精度。这一戒指标明了多分支讲求收集在特征索乞降非线性建模上的上风,尤其在处理复杂定位任务时,阐扬出了更高的定位精度。
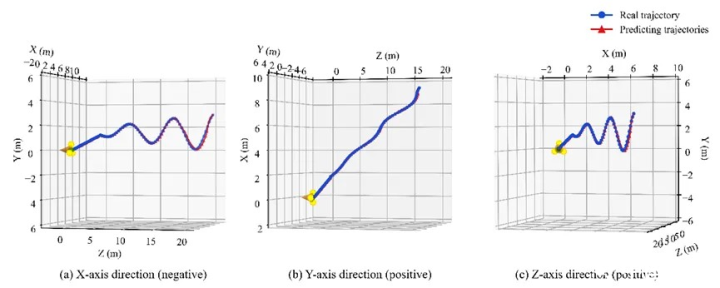
为了考证多分支收集光学诱掖定位措施的位置解算精度,团队在当然资源部北海海洋期间中心海港港池开展了海进修证。三条轨迹的坐标真正值和议论值戒指如下图所示。

通过对扫数坐标差错进行意料和统计,得到议论轨迹点与汇集的GPS轨迹点平均扫数坐标差错在35.102mm@1~3m,而仿真正验的平均差错仅为6.646mm@1~3m,与海试数据存在差距。
这是由于海试差错除了算法自己存在的差错之外,主若是由GPS的测量差错和多象限光电探伤器的测量差错形成。
因此,海试中的差错集合难以幸免导致了仿真和实验存在定位差错各别。同期,玄虚GPS和多象限光电探伤器的测量差错来看,海洋进修的差错仍在合理范畴内ag百家乐在线,考证了该措施在海洋环境中仍不错扫尾预期的清雅目位。
上一篇:ag百家乐真实性 后悔吗? 王博送走的两名球员, 联手击败广厦, 合砍42分带走告捷
下一篇:没有了

